This project is one of the Scrum projects with industry partners that were part of the AMOS Winter 2025/26 Projects. Below please find the video (you may also like the other videos) and the project summary which details the final result of the project. We run these projects every semester, so please be in touch if you would like to motivate one of your own!
Demo Video
Project Summary
| Project name | Robot Visual Perception – Optibot |
| Project mission | The mission of this project is to create a containerized system that processes a WebRTC stream as an input and outputs a stream of metadata. This metadata will contain the objects detected in a certain frame of the video stream, their bounding boxes in the image & the estimated distance. This information can be overlayed over the existing video stream in a React component. All components of the project have well defined interfaces and can easily be integrated into existing architectures. |
| Industry partner | T-Systems |
| Team logo | |
| Project summary | We were able to complete most of our goals: – Detecting Objects – Estimating Location of the Objects – Running the complete pipeline in real time – Pluggable ML Models and architecture – Containerization of the components But more importantly, we learned a lot about the “hard” parts of real time machine learning pipelines. Having both accuracy and real time performance is hard. There is always a tradeoff between performance, accuracy and costs (like the Magic Triangle covered in the course). One can always only pick two: Using a CPU is cheap, however the accuracy suffers a lot when one has the constraint of running everything in real time. Fine tuning or training your own models for this use case at runtime, but there is a high up front cost and risk involved. |
| Project Illustration | 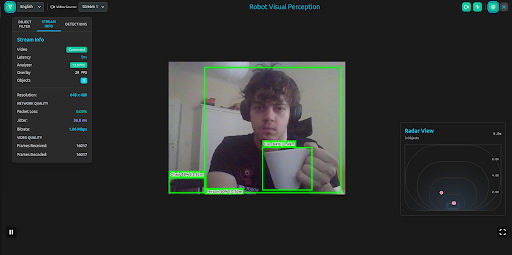 |
| Team photo | None |
| Project repository | https://github.com/amosproj/amos2025ws04-robot-visual-perception |
Discover more from Professorship for Open-Source Software
Subscribe to get the latest posts sent to your email.